Constrained Optimization-Based Performance Improvement Analysis of Vehicle Lateral Control Using All-Wheel Steering
사륜 조향 시스템을 통한 횡 차량 거동 향상의 제약 최적화 기반 분석
- Abstract
- Additional Comments
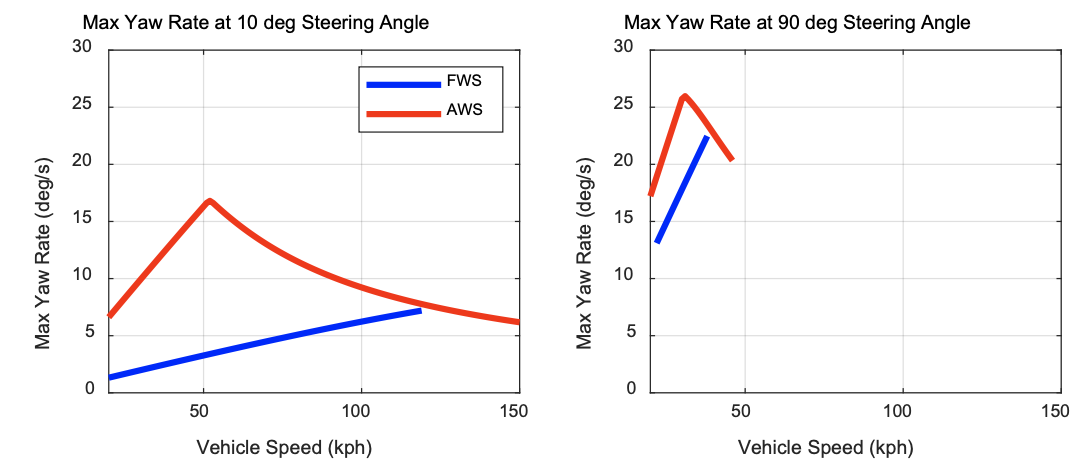
This paper investigates the effectiveness of all-wheel steering (AWS) through numerical analysis based on constrained optimization. AWS is known to improve low-speed maneuverability by steering in the opposite direction to the front wheels and to enhance high-speed stability by steering in the same direction. To quantify these benefits, two constrained optimization problems are formulated under safety-related constraints, including sideslip angle, lateral acceleration and tire non-slip conditions. The first problem determines the maximum allowable yaw rate over a range of longitudinal velocities and front steering angles, while second determines the minimum achievable sideslip angle for a given yaw rate condition under the same constraints. The results shows that RWS enlarges the feasible operating region in terms of longitudinal velocity and front steering angle, increases the allowable yaw rate and significantly reduces the sideslip angle.