Vector-Space Optimization Framework Based on Projected Contraction Condition for Control Design with Input Saturation
- Abstract
- Additional Comments
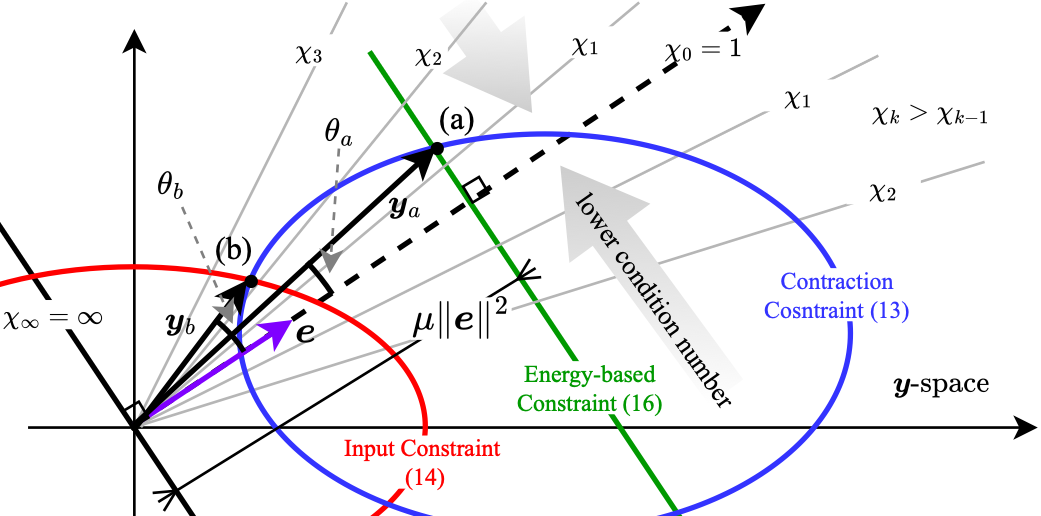
Conventional feedback control design based on contraction theory typically requires matrix-valued contraction metrics, which can limit real-time applicability as the system dimension increases and make direct handling of input saturation nontrivial. To address these issues, we project the contraction condition onto the instantaneous trajectory-error direction and introduce the metric-weighted error vector as the optimization variable. This yields a lower-dimensional formulation that avoids direct optimization over the full matrix-valued metric and enables input saturation constraints to be incorporated directly. Additionally, an energy-based constraint is introduced to resolve the scale ambiguity of condition-number minimization and maintain sufficient control effort. The effectiveness of the proposed method is validated through numerical simulations using the Lorenz system.
Prof. Sesun You is Assistant Professor at Incheon National University, Incheon, South Korea. His biographical information can be found at his Google Scholar profile.