Research Background
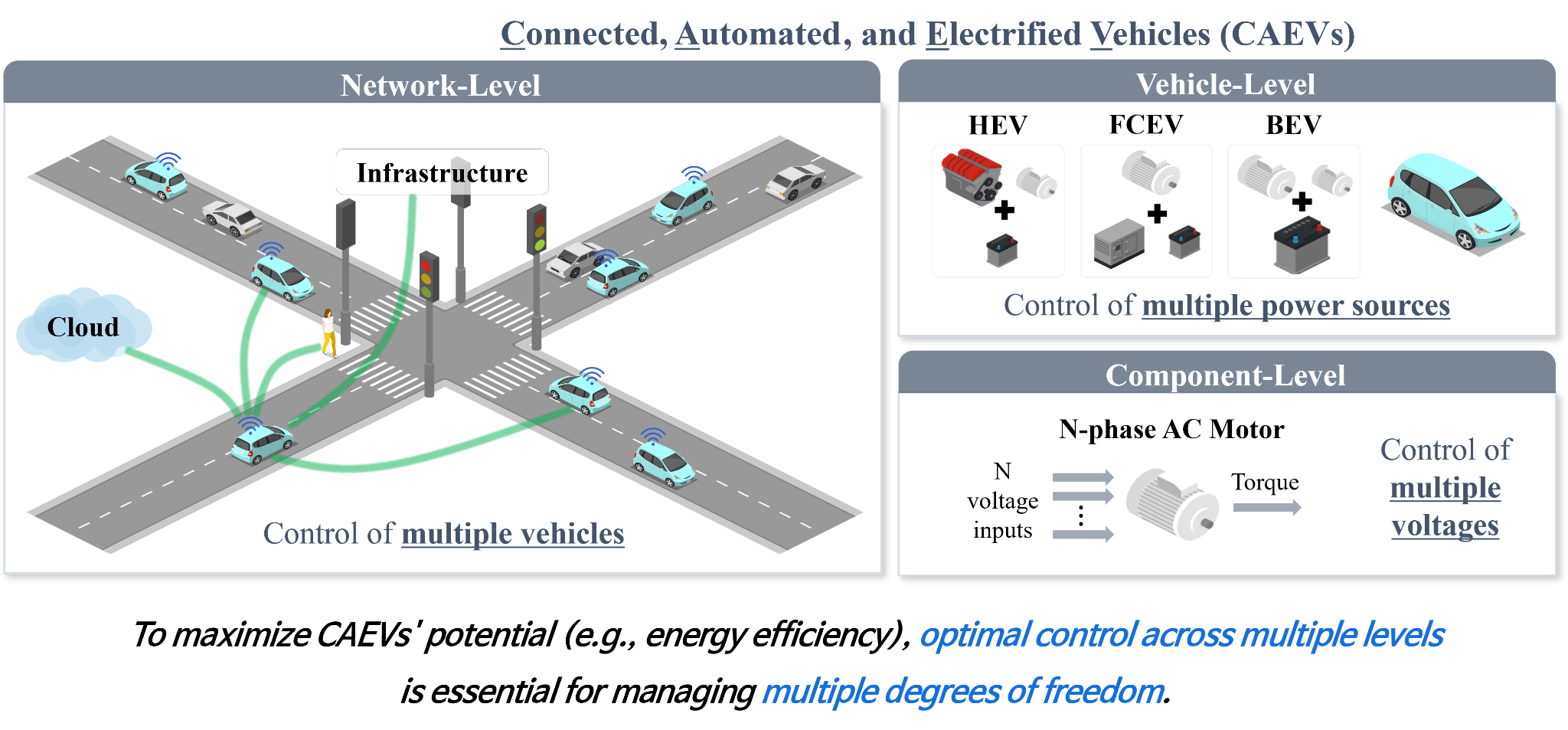
In the future, vehicles will be seamlessly connected—not only to each other but also to infrastructure, pedestrians, and the cloud. This connectivity will allow vehicles to access vast amounts of real-time information, enabling them to make autonomous and cooperative decisions. At this level, vehicles are connected and automated, forming a complex network of mobility. Each vehicle will also be electrified, utilizing multiple power sources for improved energy efficiency. Examples include hybrid electric vehicles (HEVs), fuel cell electric vehicles (FCEVs), and battery electric vehicles (BEVs). Among these, electric motors will play a crucial role as the core component driving electrified vehicles.
Control of these connected, automated, and electrified vehicles (CAEVs) involves managing multiple degrees of freedom (DOF) at various levels. At the network level, this includes controlling multiple vehicles and their interactions. At the vehicle level, it involves optimizing the use of multiple power sources. Finally, at the component level, it requires precise control of multiple voltages within electric motors.
To fully unlock the potential of CAEVs, such as maximizing energy efficiency, optimal control across multiple levels is essential for managing these complex and interconnected degrees of freedom effectively.
Research Program
[1] K. Choi, J. Kim, and K.-B. Park*, “Generalized Model Predictive Torque Control of Synchronous Machines,” IEEE/ASME Transactions on Mechatronics, Early Access.
[2] K. Choi, J. Byun, S. Lee, and I. G. Jang*, “Adaptive Equivalent Consumption Minimization Strategy (A-ECMS) for the HEVs with a Near-optimal Equivalent Factor Considering Driving Conditions”, IEEE Transactions on Vehicular Technology, vol. 71, no. 3, pp. 2538-2549, 2022.
[3] K. Choi*, S. Shin, and M. Seo, “Cooperative Merging in Mixed Traffic Based on Strategic Influence of Connected Automated Vehicles on Human-Driven Vehicle Behavior,” Under review for Advanced Intelligent Systems.
[4] K. Choi, G. Park, and D. Kum*, “An Analytical Approach to the Predictive Energy Management of Connected HEVs: What Information Do We Need to Guarantee Global Optimality?,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 9, pp. 12749-12761, 2024.
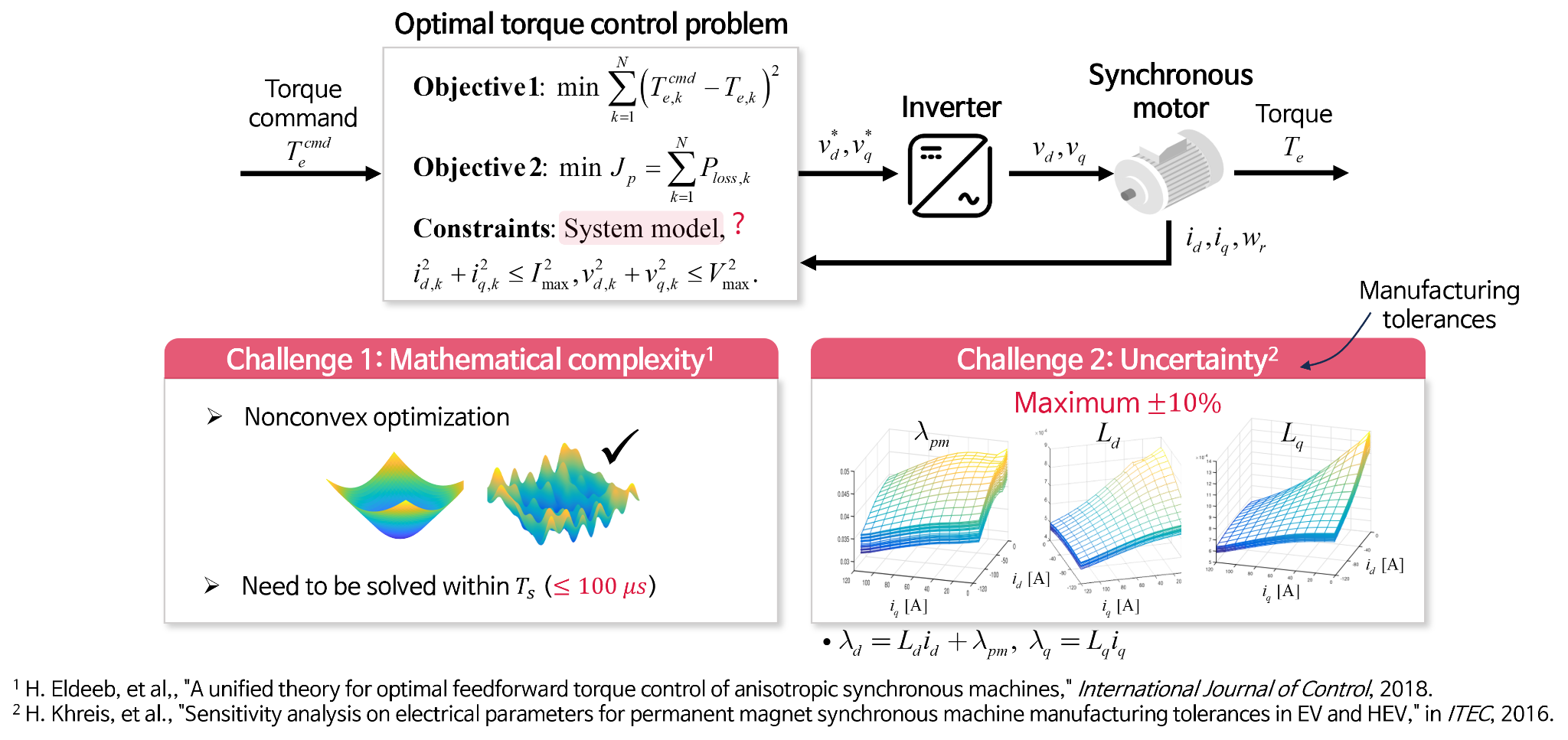
Component-level Research: Optimal Torque Control of Electric Motors
Problem Statement
Relevant work
[1] K. Choi, J. Kim, and K.-B. Park*, “Generalized Model Predictive Torque Control of Synchronous Machines,” IEEE/ASME Transactions on Mechatronics, Early Access.
[2] K. Choi, Y. Kim, S.-K. Kim*, and K.-S. Kim*, “Computationally Efficient Model Predictive Torque Control of Permanent Magnet Synchronous Machines Using Numerical Techniques,” IEEE Transactions on Control Systems Technology, vol. 30, no. 4, pp. 1774-1781, 2022.
[3] K. Choi, Y. Kim, K.-S. Kim*, and S.-K. Kim*, “Real-time Optimal Torque Control of Interior Permanent Magnet Synchronous Motors Based on a Numerical Optimization Technique,” IEEE Transactions on Control Systems Technology, vol 29, no. 4, pp. 1815-1822, 2021.
[4] K. Choi, Y. Kim, S.-K. Kim*, and K.-S. Kim*, “Current and Position Sensor Fault Diagnosis Algorithm for PMSM Drives Based on Robust State Observer,” IEEE Transactions on Industrial Electronics, vol. 68. no. 6, pp. 5227-5236, 2021.
[5] K. Choi, Y. Kim, S.-K. Kim*, and K.-S. Kim, “Auto-calibration of Position Offset for PMSM Drives with Uncertain Parameters,” Electronics Letters, vol 56, no. 20, pp. 1048-1051, 2020.
[6] K. Choi, D. S. Kim, and S.-K. Kim*, “Disturbance Observer-based Offset-free Global Tracking Control for Input-constrained LTI Systems with DC/DC Buck Converter Applications,” Energies, vol. 13, no. 16, p. 4079, 2020.
[7] K. Choi, Y. Kim, K.-S. Kim, and S.-K. Kim*, “Output Voltage Tracking Controller Embedding Auto-tuning Algorithm for DC/DC Boost Converters,” IET Power Electronics, vol. 12, no. 14, pp. 3767-3773, 2019.
[8] K. Choi, K.-S. Kim*, and S.-K. Kim*, “Proportional-type Sensor Fault Diagnosis Algorithm for DC/DC Boost Converters Based on Disturbance Observer,” Energies, vol. 12, no. 8, p. 1412, 2019.
[9] K. Choi, Y. Kim, K.-S. Kim*, and S.-K. Kim*, “Using the Stator Current Ripple Model for Real-time Estimation of Full Parameters of a Permanent Magnet Synchronous Motor,” IEEE Access, vol. 7, pp. 33369-33379, 2019.
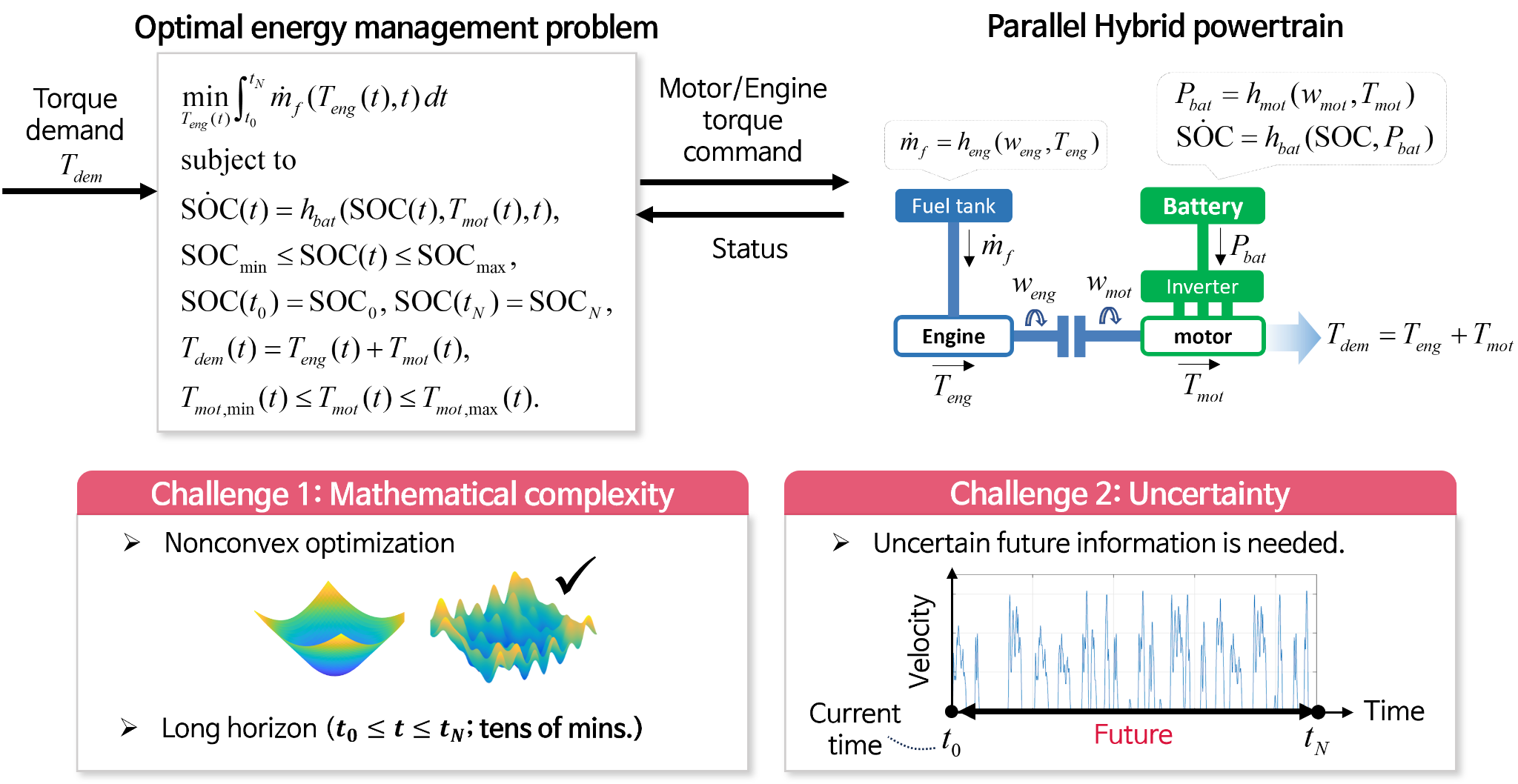
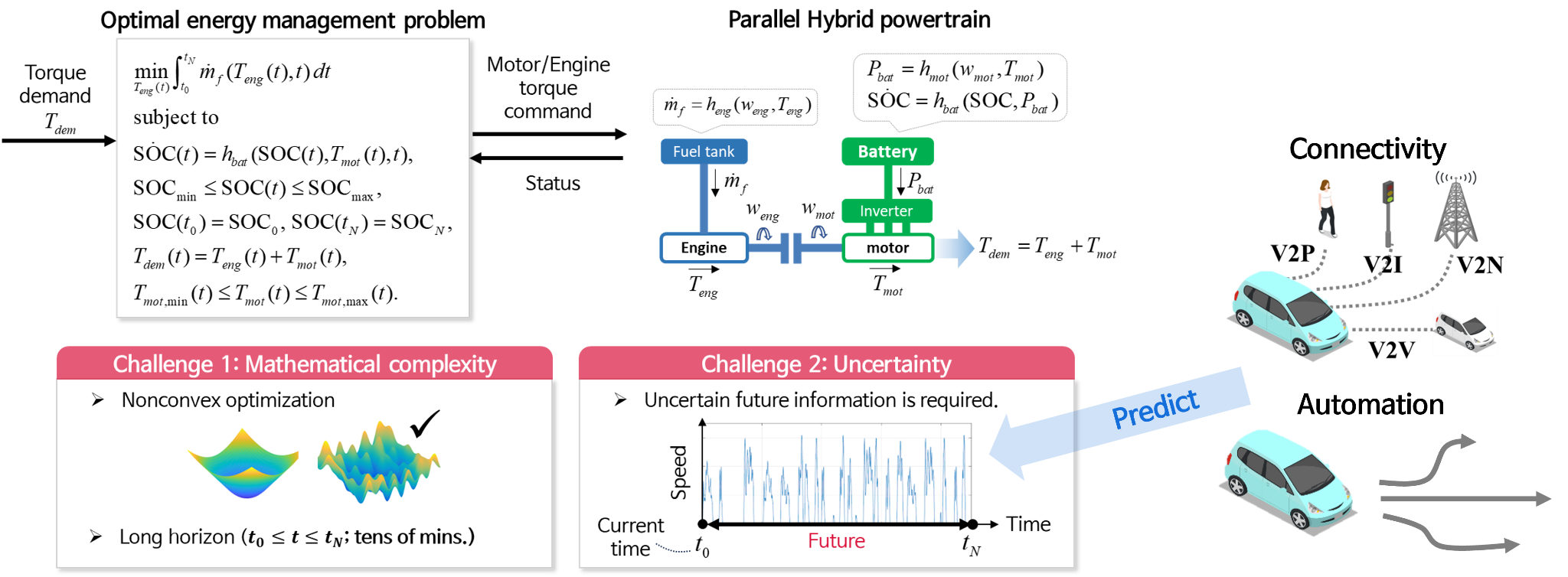
Vehicle-level Research: Energy Management of Hybrid Powertrain
Problem Statement
Relevant work
[1] K. Choi, J. Byun, S. Lee, and I. G. Jang*, “Adaptive Equivalent Consumption Minimization Strategy (A-ECMS) for the HEVs with a Near-optimal Equivalent Factor Considering Driving Conditions”, IEEE Transactions on Vehicular Technology, vol. 71, no. 3, pp. 2538-2549, 2022.
[2] J. Byun and K. Choi*, “Effects Analysis of Light-duty Diesel Truck Hybrid Conversion Depending on Driving Style,” Transportation Research Part D: Transport and Environment, vol. 97, pp. 102958, 2021.
Network-level Research: Predictive Energy Management of CAEVs
Problem Statement
Relevant work
[1] G. Park, K. Choi, and D. Kum*, “Predictive Control of a Dog-clutch Transmission via a Transformer-based Velocity Prediction,” IEEE Transactions on Vehicular Technology, Early Access.
[2] K. Choi, G. Park, and D. Kum*, “An Analytical Approach to the Predictive Energy Management of Connected HEVs: What Information Do We Need to Guarantee Global Optimality?,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 9, pp. 12749-12761, 2024.
[3] G. Park, K. Choi, and D. Kum*, “Stack Degradation Protection of FCEVs via Predictive Energy Management Strategy with Segmented Roads,” in 2024 American Control Conference (ACC), 2024: IEEE, pp. 3643-3649.
[4] K. Choi and W. Kim*, “Real-time Predictive Energy Management Strategy for Fuel Cell-powered Unmanned Aerial Vehicles Based on the Control-oriented Battery Model,” IEEE Control Systems Letters, vol. 7, pp. 943-948, 2023 (The contents of this paper were also selected by ACC 2023 Program Committee for presentation at the Conference).
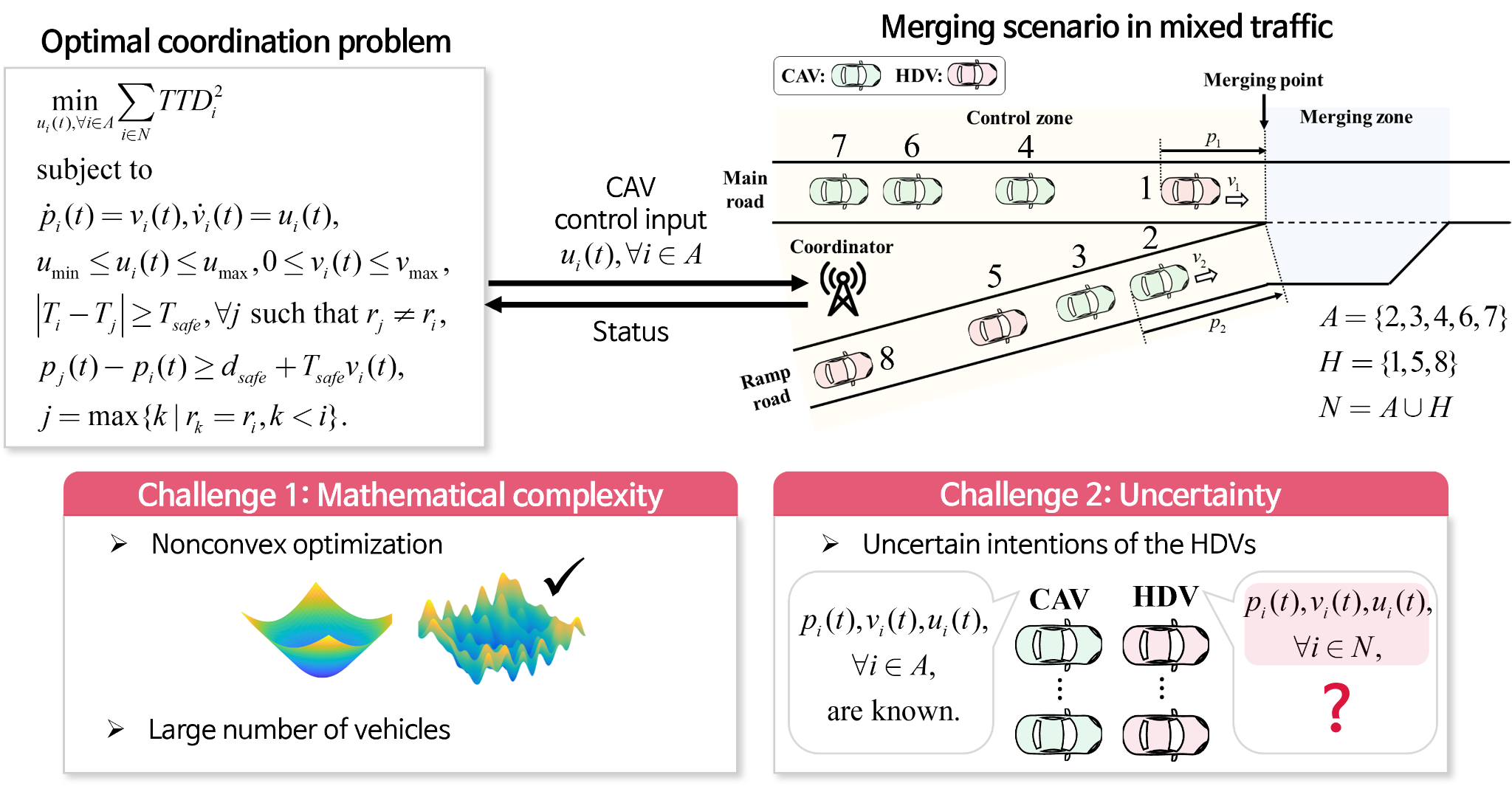
Network-level Research: Cooperative Driving Control of CAEVs
Problem Statement
Relevant work
[1] K. Choi*, S. Shin, and M. Seo, “Cooperative Merging in Mixed Traffic Based on Strategic Influence of Connected Automated Vehicles on Human-Driven Vehicle Behavior,” Under review for Advanced Intelligent Systems.
[2] M. Seo, S. Shin, K. Kim, and K. Choi*, “Reinforcement Learning-based Collision Avoidance of a Connected and Automated Vehicle at Merging Roads,” in 2023 International Workshop on Intelligent Systems (IWIS), 2023: IEEE.