Data-driven Modeling of Model Residuals for Linear Model Predictive Control of Nonlinear Systems
비선형 시스템의 선형모델예측제어를 위한 데이터 기반 시스템 잔차 모델링
- Abstract
- Additional Comments
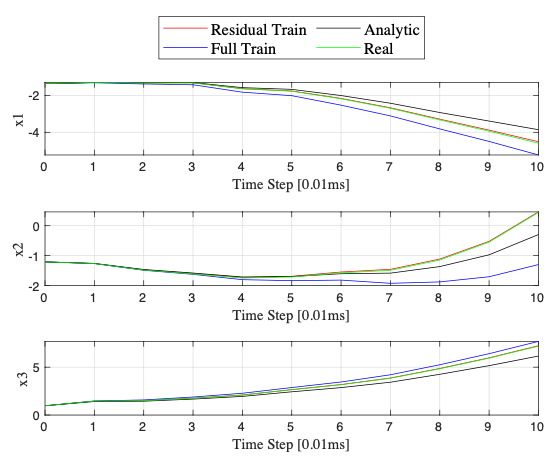
An accurate system model is essential for predictive control schemes that use the system model to predict the future trajectory of states. To describe the system model precisely including residual terms, nonlinear approximators like the neural network can be used. However, training the whole system model needs big sample dataset which is hard to collect from the real environment. Thus, recent research focuses on high sample-efficient learning methods that utilize a pre-driven analytic model. In this paper, we propose to train only the residual terms in the system model from the dataset obtained by subtracting the analytic terms from the real data. A simulation study demonstrates modeling the residuals terms, the proposed method, ensures faster and more accurate learning than modeling the whole system model.