Integrated Motion Control of Four in-Wheel Motor Actuated Vehicles Considering Path Tracking, Ride Comfort, and Energy Efficiency
경로 추종, 동적 승차감, 그리고 에너지 효율을 고려한 전륜 인휠모터 자동차의 통합 운동 제어
- Abstract
- Additional Comments
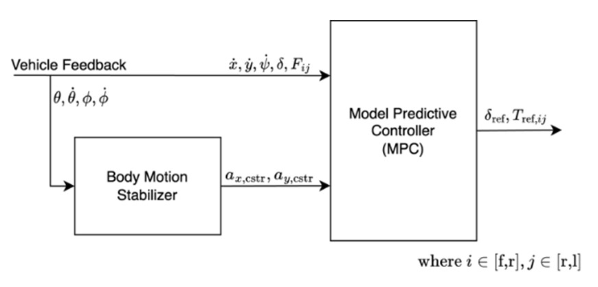
근 자율주행 자동차의 발전에 따라, 주어진 경로를 차량 안정성을 만족하며 추종할 수 있는 차체 운동 제어기에 대한 여러 방법들이 제시되고 있다. 하지만, 경로 추종과 더불어 동적 승차감과 에너지 효율을 동시에 고려하는 것은 힘들다. 이 논문에서는 자율주행 전기차를 위한 경로 추종과 에너지 효율, 동적 승차감을 고려한 통합 제어 프레임워크를 제안한다. 제안된 방법은 Figure. 1과 같이 경로 추종과 에너지 효율을 위한 모델 예측 제어기(Model Predictive Controller)와 동적 승차감을 위한 차체 운동 안정기(Body Motion Stabilizer)로 구성된다. 차체 운동 안정기는 roll과 pitch 각을 안정화 할 수 있는 종, 횡방향 가속도의 범위를 결정한다. 이후 모델 예측 제어기는 앞서 구한 범위를 추가 제약조건으로 사용하여 추종 오차와 에너지 효율을 고려한 최적의 조향각과 각 바퀴의 토크를 결정한다. 제안된 제어기법은 전륜 인휠 모터로 구동되는 자동차를 이용하여 두가지 시나리오에 대하여 검증되었다. Roll과 pitch에 대한 제어 효과를 검증하기 위하여 임의의 bump가 포함한 도로를 사용하였다. 검증 결과로 제안된 제어기법이 임의의 bump를 포함한 도로에 대하여 경로 추종과 동적 승차감, 에너지 효율에 향상된 성능을 가진다는 것을 확인하였다.