Approximation-based Steering Controller with Deep Neural Network
심층신경망 근사기반 조향 제어기
- Abstract
- Additional Comments
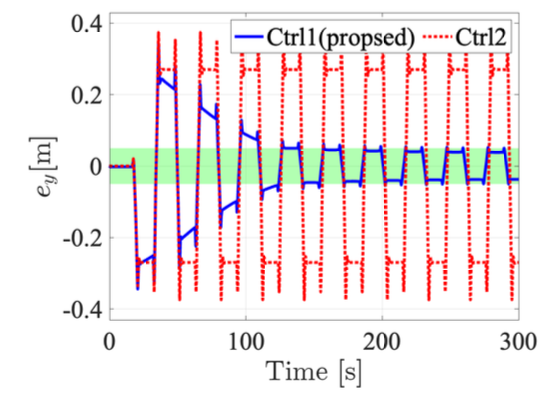
This paper introduces an approximation-based steering controller. The controller has three features: 1) Deep Neural Network (DNN) is employed as an approximator; 2) the stability of the controller is proven; 3) robustness of the controller is improved through some robust adaptive control techniques. The control policy in the controller is a type of feedback linearization control. Therefore, to cancel the system functions, the DNN approximates the unknown nonlinear system functions in the system dynamics. The adaptation laws for learning are derived using Lyapunov stability analysis. Using the analysis, the asymptotic convergence of the tracking error is guaranteed. Moreover, to prevent unpredictable parameter drift and chattering control around reference trajectory, 𝜖-modification and dead-zone modification are used. A simulation study using CarMaker demonstrates that the controller improves performance by learning the system functions.