Physics-Constrained Kalman Filtering for Wheel Normal Load Estimation Using Suspension and IMU Measurements
- Abstract
- Additional Comments
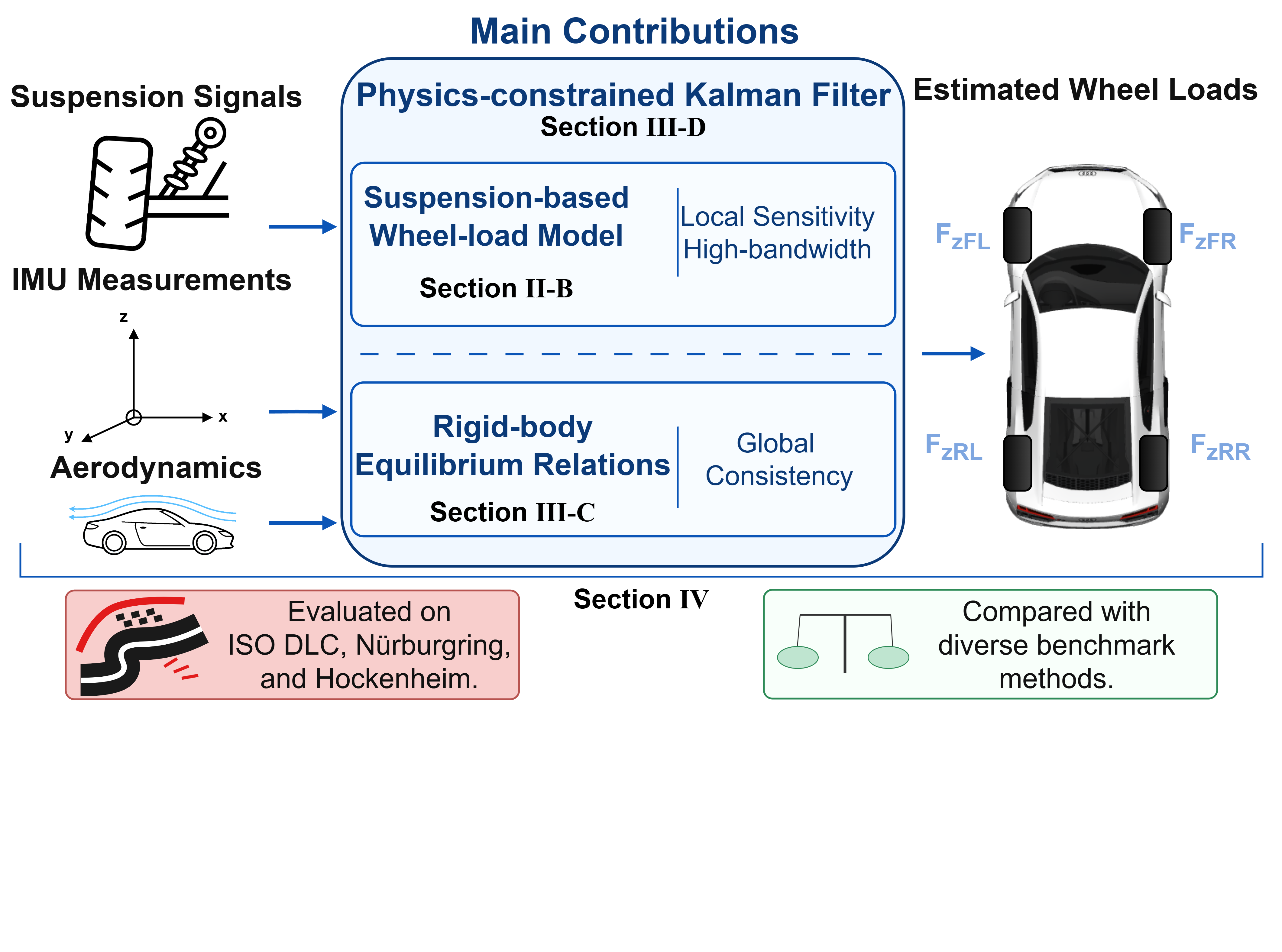
This paper presents a physics-constrained Kalman filtering approach for estimating individual wheel normal loads using suspension and inertial measurement unit (IMU) measurements. The proposed method combines suspension-based wheel-load pseudo-measurements with IMU-based rigid-body equilibrium relations. These relations, including vertical-force, pitch-moment, and roll-moment equilibrium, are incorporated as probabilistic physical constraints, enabling the estimator to retain local sensitivity to suspension-induced load variations while enforcing global physical consistency in the wheel-load distribution. Spring, asymmetric damper, anti-roll-bar, and aerodynamic effects are included to improve the fidelity of the pseudo-measurements and constraints. The method is validated in IPG CarMaker under diverse driving scenarios, including the ISO double lane change, Nürburgring, and Hockenheim, and is compared with algebraic, quasi-static, suspension-only, and literature-based observer methods. The results demonstrate that the proposed method provides the most consistent overall performance across transient and full-lap conditions, while ablation studies confirm the dominant role of the physics-based constraint update in robust estimation.