Path Control of a Connected and Automated Vehicle at Intersections and Merging Zones Using Attention Mechanism-Based Reinforcement Learning
어텐션 메커니즘 기반 강화학습을 활용한 교차로 및 합류 구간에서의 커넥티드 자율주행차 경로 제어
- Abstract
- Additional Comments
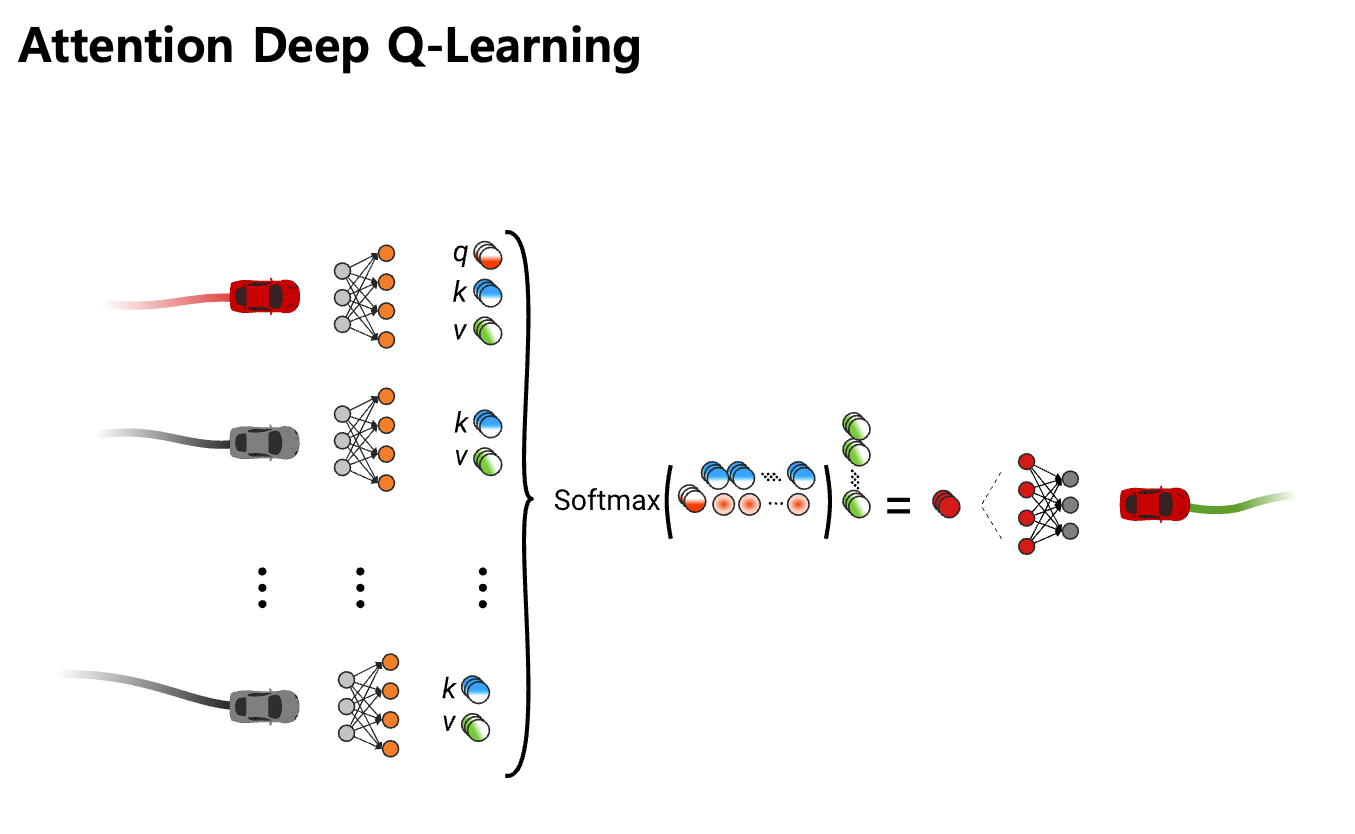
자율주행 기술이 Level 5(완전 자율주행)에 도달해 전면적으로 보급되기 전까지는, 도로 상에 자율주행 시스템과 운전자가 공존할 것으로 예상된다. 이러한 과도기적인 시점에서는 운전자와 자율주행 차량과의 상호작용이 중요하다. 하지만 교차로나 합류 구간과 같은 복잡한 상호작용 시나리오에서는 운전자주행차의 의도를 알아차릴 수 없기 때문에 자율주행 차량이 방어적으로 주행하는 경향성을 보이는데, 이는 곧 교통 체증이나 후미 충돌 사고로 이어질 가능성이 높다. 이러한 문제점을 해결하고 안정성을 향상시키기 위해 주변 차량의 위치, 속도, 방향 등의 정보를 활용하는 커넥티드 자율주행차가 주목받고 있다. 본 논문에서는 교차로 및 합류 구간에서 커넥티드 자율주행차와 운전자주행차가 주행하는 상황을 고려한다. 다양한 상황에 대해서도 유동적으로 대응하고, 주변에 있는 여러 차량들의 정보 중 충돌 회피를 위한 정보를 중점적으로 고려하기 위해 어텐션 메커니즘 기반 강화학습을 사용하여 커넥티드 자율주행차의 경로제어를 학습시켰다. 제안한 방법은 트래픽 시뮬레이션 프레임워크인 Highway Env를 사용하여 구현한 시뮬레이션 환경에서 검증하였다.