Reinforcement Learning-Based Collision Avoidance of a Connected and Automated Vehicle at Merging Roads
- Abstract
- Additional Comments
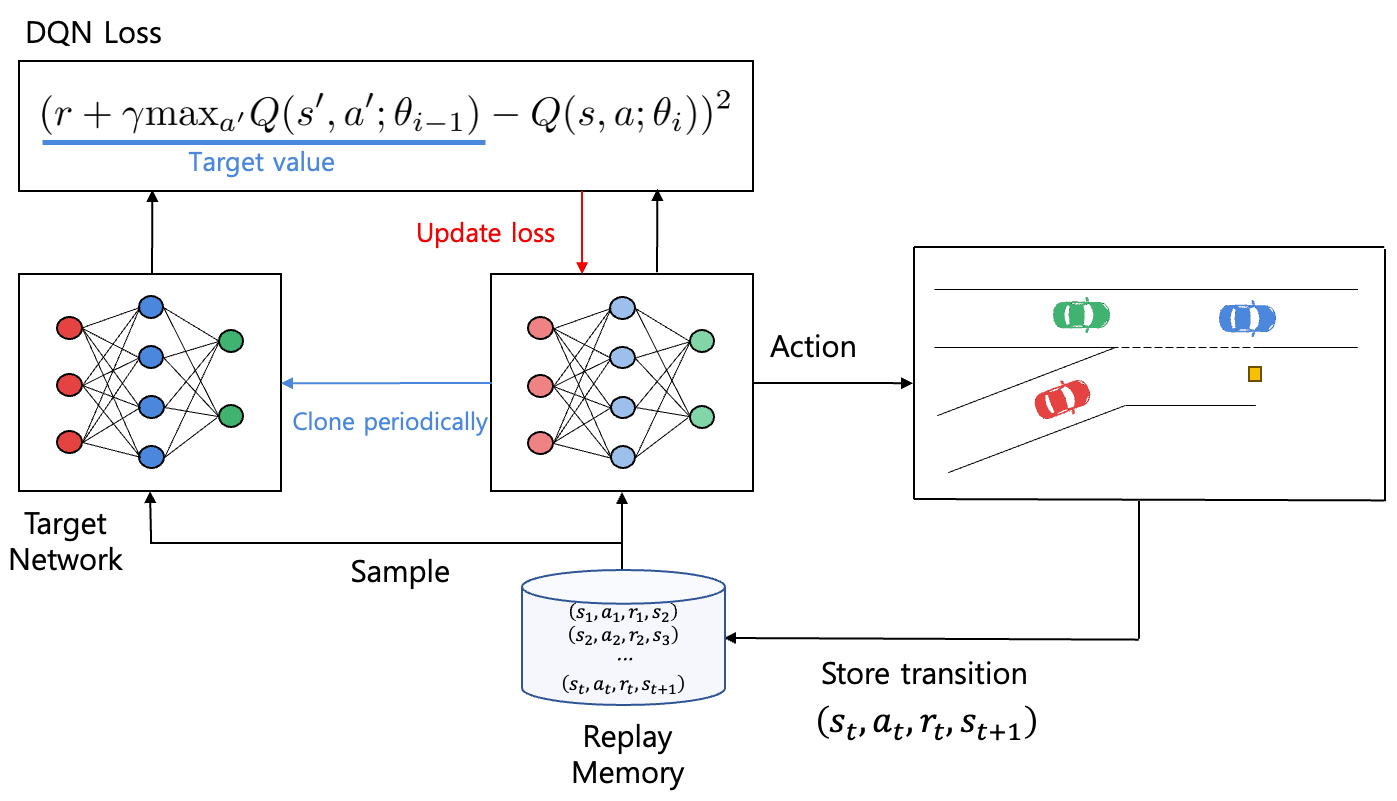
Although autonomous driving technology has made significant advancements, autonomous vehicles tend to be defensive in complex environments such as merging roads, intersections, and roundabouts. Connected autonomous vehicles (CAVs) are expected to behave more naturally even in such complex environments leveraging information obtained through vehicle connectivity, such as neighboring vehicles’ position and velocity. This study presents a reinforcement learning-based framework for collision avoidance of a CAV at merging roads. The key idea is to redesign the reward function of previous relevant work so that collision avoidance is realized more in a human-like and predictive manner.