Using Deep Reinforcement Learning for Intelligent Gain Adjustment of a Disturbance Observer
외란관측기의 심층강화학습 기반 지능형 자동 동조 기법
- Abstract
- Additional Comments
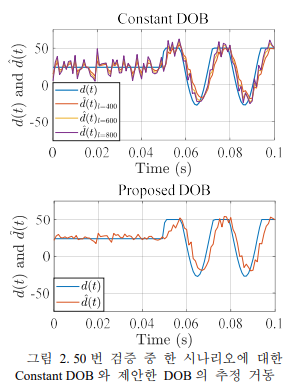
This paper proposes a deep reinforcement learning (DRL) based dynamic gain disturbance observer (DOB) that intelligently adjusts its gain and thereby resolves the trade-off problem between increasing estimation accuracy and reducing noise sensitivity in designing DOBs. First, a variable gain DOB is designed by modifying the conventional DOB. Then, DRL is used to train a dynamic gain adjuster for the variable gain DOB. A case study demonstrated that the proposed dynamic gain DOB increases its gain only when needed and otherwise decreases the gain to reduce noise. Comparison with the conventional DOB of various constant gains shows that the proposed DOB achieves superior performance.