Integral Error-Based Adaptive Neural Identifier for Nonlinear Lateral Tire Forces
- Abstract
- Additional Comments
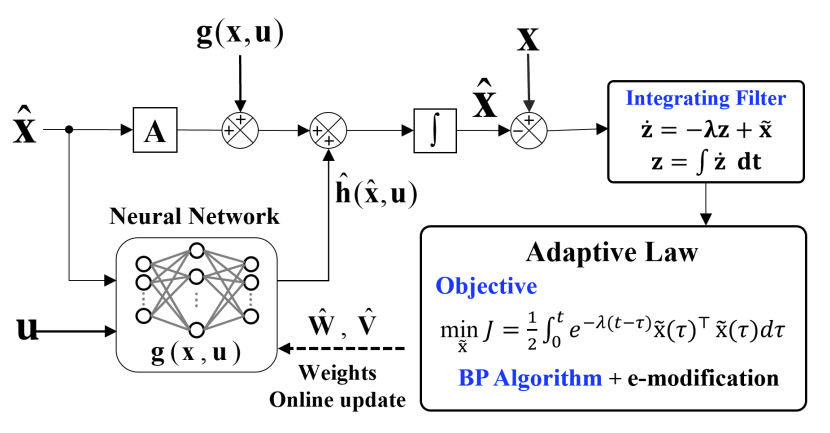
This paper presents an integral error-based adaptive neural identifier for online estimation of nonlinear lateral tire forces in vehicle dynamics. The adaptive law is derived from anexponentially weighted integral cost functional, which introduces a filtered error for weight updates and guarantees uniform ultimate boundedness of the estimation error, mitigating local overfitting inherent to instantaneous error-based schemes. To evaluate whether the network has learned a consistent, time invariant nonlinear mapping, a Frozen-Weight Reproducibility Test is introduced, in which past data are replayed using frozen neural network weights. Simulations under step-steer and slalom maneuvers show that the proposed identifier achieves real-time tire force estimation accuracy comparable to a conventional instantaneous error-based scheme, while significantly improving frozen-weight reproducibility and overall model consistency.