Robust Imitation Learning with Attention Constraints and Risk Awareness for Motion Planning in Autonomous Driving
- Abstract
- Additional Comments
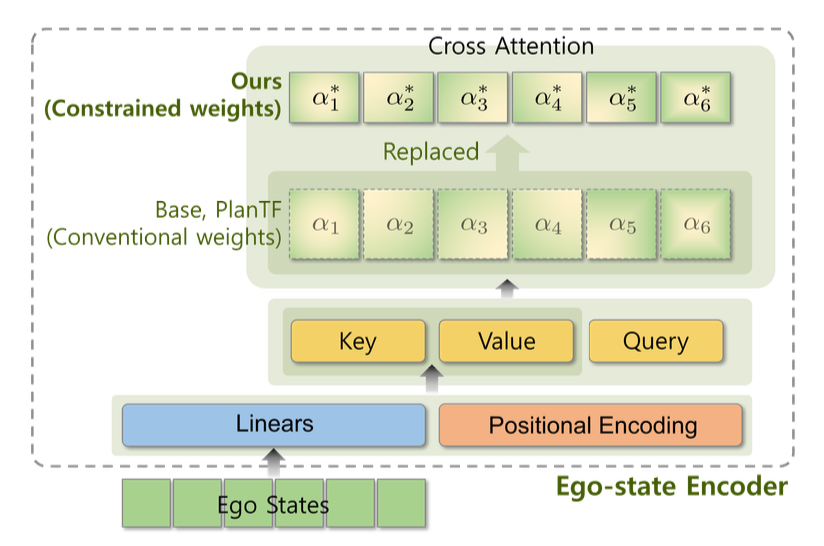
Imitation learning (IL) has become a common approach for autonomous-driving motion planning, but achieving robust and safe behavior remains difficult under distribution shift and rare hazard scenarios. A key limitation is that IL objectives typically prioritize mean accuracy (e.g., Average Distance Error), which can high-consequence failures in the long tail. Moreover, planners that use attention mechanisms, including Transformer-based planners, can exhibit attention collapse such as shortcut learning by over-relying on a small subset of state channels. This dissertation proposes a robust IL framework for motion planning that combines attention constraints and risk awareness. Mean-Deviation Constrained Attention (MDCA) promotes balanced state usage, and a Conditional Value-at-Risk (CVaR)-based tail-risk objective down-weights rare but potentially dangerous modes. Experiments on the nuPlan benchmark show improved robustness and safety-related metrics over State-Of-The-Arts planners.