State-Error-Based Online Learning of Control-Oriented Tire Force Models Using Grid Memory
제어 지향 타이어 횡력 모델의 그리드 메모리를 이용한 상태 오차 기반 온라인 학습
- Abstract
- Additional Comments
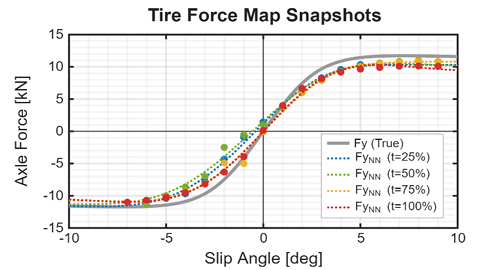
This paper proposes an online learning method for a control-oriented neural-network tire-force model using state prediction error. The prediction error of a bicycle-model predictor is projected onto the lateral force input direction to generate a force-domain target without direct tire-force measurement. The target is stored at preassigned slip-angle points as a slip-angle grid memory to promote consistency of the learned tire-force model. Simulation results in a high-speed slalom scenario show that the final frozen network reproduces the online force estimate, indicating that the learned tire-force model retains the force-slip relation.