Constrained Optimization-Based Neuro-Adaptive Control (CONAC) for Euler-Lagrange Systems Under Weight and Input Constraints
Techrxiv, 2024 [🌐 Preprint Online] [📃 Preprint Full-Text]
- Abstract
- Additional Comments
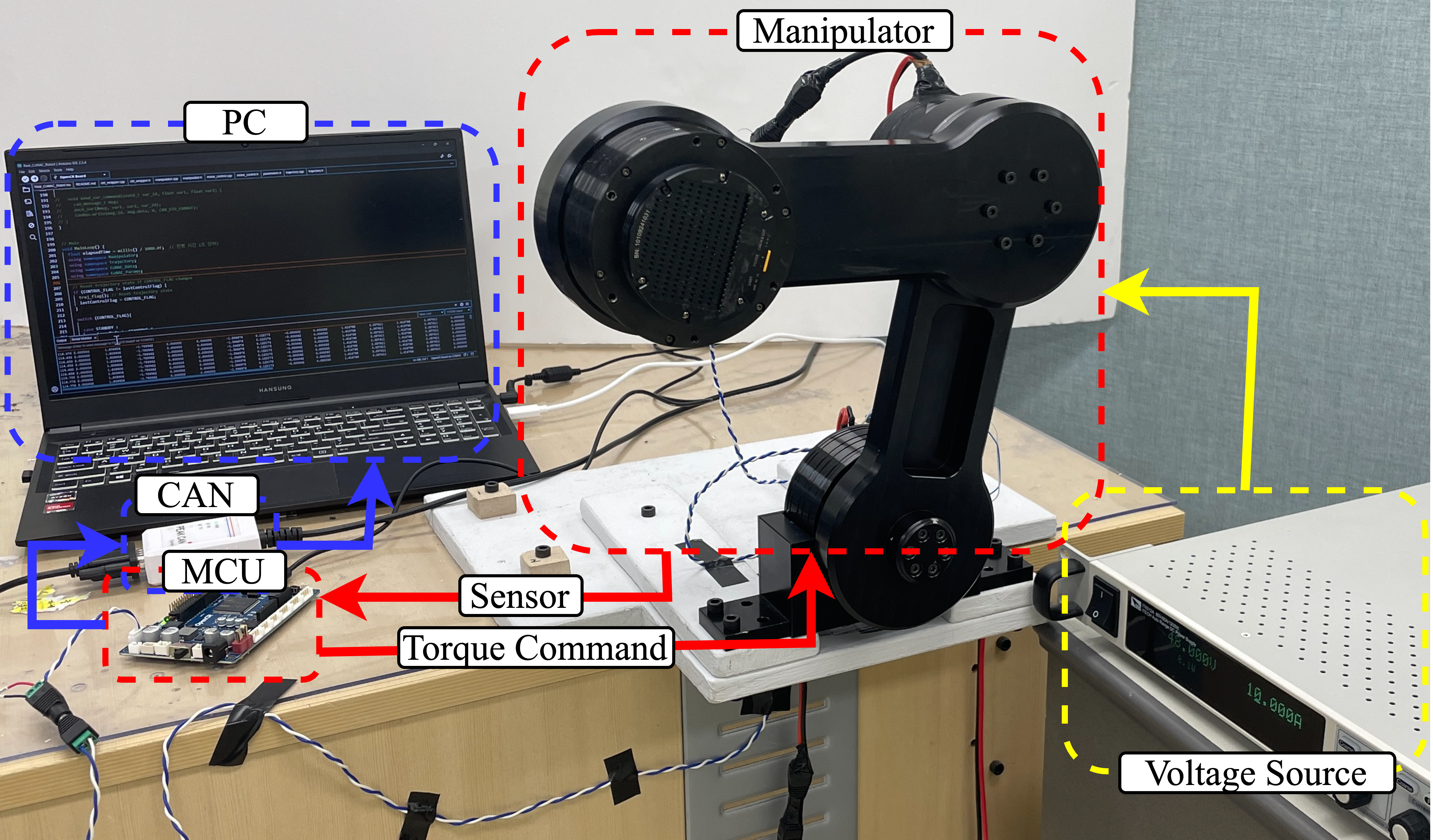
This study presents a constrained optimization-based neuro-adaptive control (CONAC) for unknown Euler-Lagrange systems subject to weight and convex input constraints. A deep neural network (DNN) is employed to approximate the ideal stabilizing control law while simultaneously learning the unknown system dynamics and addressing both types of constraints within a unified constrained optimization framework. The adaptation law of DNN weights is formulated to solve the defined constrained optimization problem, ensuring satisfaction of first-order optimality conditions at steady state. The controller’s stability is rigorously analyzed using Lyapunov theory, guaranteeing bounded tracking errors and bounded DNN weights. The proposed controller is validated through a real-time implementation on a 2-DOF robotic manipulator, demonstrating its effectiveness in achieving accurate trajectory tracking while satisfying all imposed constraints.