Integral Error-Based Adaptive Neural Identifier for a Class of Uncertain Nonlinear Systems
- Abstract
- Additional Comments
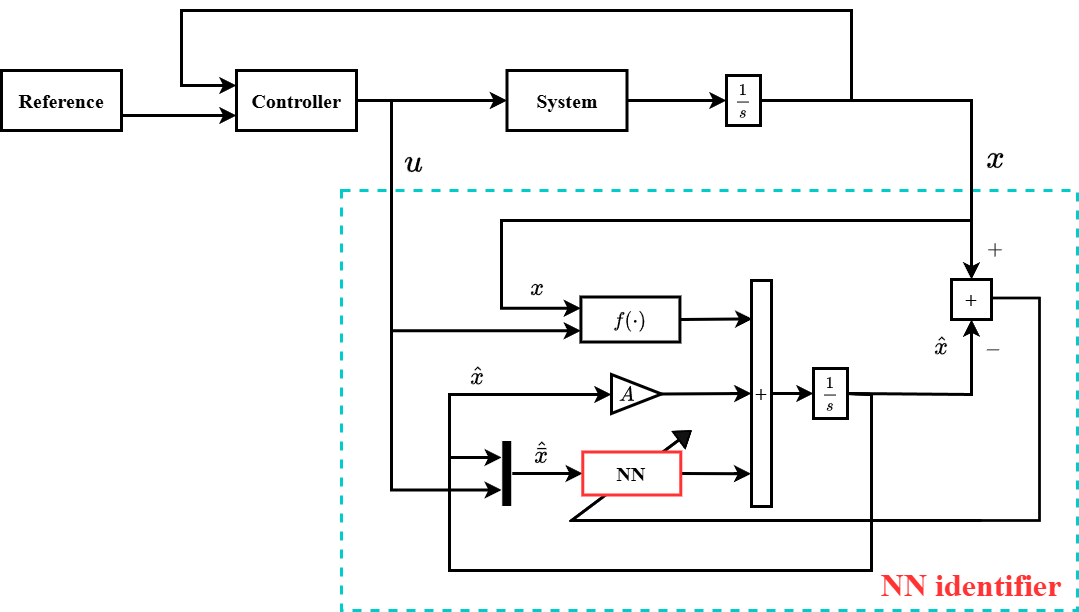
This study proposes an integral error-based adaptive law for neural identifiers, aimed at enhancing the performance of online system identification for nonlinear systems. Unlike conventional adaptive laws that update the neural network based on instantaneous errors, the proposed approach performs updates using identification errors accumulated over time. This mechanism enables the neural network to achieve more consistent and accurate function approximation over the entire time interval, ensuring stable online learning of unknown nonlinear dynamics. A Lyapunov-based theo-retical analysis guarantees the uniform ultimate boundedness of the neural identifier. Simulation results on a nonlinear robot manipulator system demonstrate the effectiveness and improved convergence properties of the proposed method compared to a conventional instantaneous error-based approach.